Designing What Autonomy Actually Looks Like
Inside NuPort’s Collaboration with Humber Polytechnic Transportation Design Students
Autonomous trucking is evolving quickly. AI is improving. The sensors are getting better. Real-world deployment is accelerating.
But one part of the industry still feels unfinished: how autonomy physically integrates onto the vehicle itself.
Across the industry, perception systems: LiDAR, radar, cameras, compute modules, are often engineered for functionality first and vehicle integration second. Technically capable, but visually disconnected from the truck platforms they operate on.
At NuPort, we believe that has to change.
Because the future of autonomous freight will not be defined only by software performance. It will also be defined by how seamlessly these systems integrate into real commercial vehicles operating in harsh, demanding environments every day.
So rather than solving this challenge internally alone, NuPort opened the problem to the next generation of transportation designers.

A NuPort Class 8 truck at Humber Polytechnic, where students engage in a walk-around inspection of the technology and ask questions about the vehicle.
An Industry Challenge, Not a Classroom Exercise
In partnership with Humber Polytechnic, NuPort launched an 8-week transportation design competition with fourth-year students from Humber’s Transportation Design program, the only academic program of its kind in Canada focused specifically on transportation design.
Students were challenged to design a complete vehicle-wide perception system for autonomous Class 8 trucks operating in logistics and industrial environments.
This included:
LiDAR integration
Radar placement
Camera systems
Sensor housings
Mounting strategies
Manufacturing considerations
Serviceability and maintenance access
Environmental protection for harsh operating conditions
Students were given access to:
NuPort hardware references
Dimensional constraints
Real sensor packaging challenges
A Volvo Class 8 truck for evaluation and study
Weekly critiques with NuPort engineering and leadership teams
Each student developed a complete end-to-end perception system, reflecting how advanced vehicle programs are explored in industry.
Ken Cummings, Professor, Transportation Design, Humber Polytechnic
“This was a unique opportunity for our students to work on an advanced technology challenge with real constraints and expectations. NuPort didn’t ask for speculative concepts, they wanted solutions that could realistically be built and deployed. That level of engagement pushes students to think differently, and the results reflect that.”
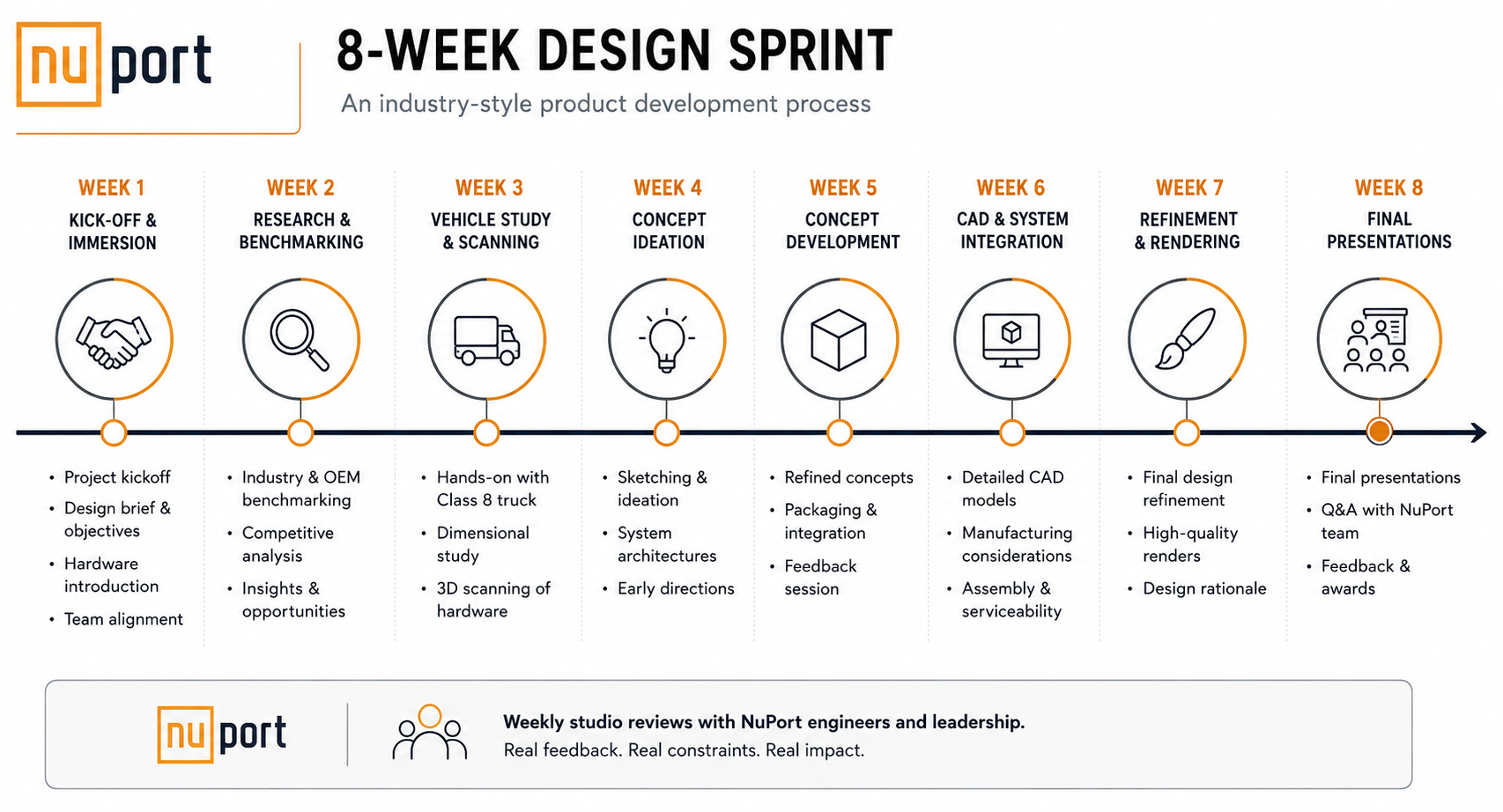
8-week Design Sprint
Designing for Deployment
Over the course of the program, eight complete perception system concepts were developed. What stood out was not simply creativity, it was the level of practical thinking behind the work.
Students quickly realized that designing for autonomy is not about adding sensors onto a truck. It is about balancing:
Visibility
Durability
Manufacturability
Maintenance
Environmental protection
Integration with vehicle architecture
The strongest concepts approached the problem the same way real-world autonomy companies do: as a complete systems integration challenge.
Several designs explored:
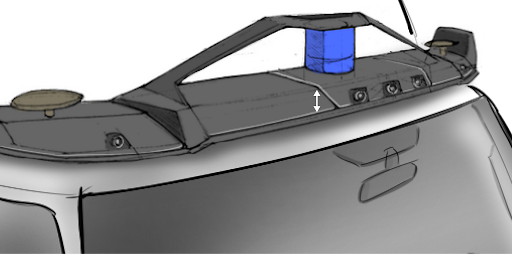
Low-profile sensor packaging
Modular serviceable housings
Integrated roofline systems
Aerodynamic sensor placement strategies
Manufacturing-ready enclosure concepts
Two final concepts are now of direct interest to NuPort and may influence future prototype development and engineering exploration.
That was always the objective: generate commercially relevant design thinking that could extend beyond the classroom.

Ideation sketches from the students being displayed ready for review/critique.
Design development; concepts being further developed using digital tools.

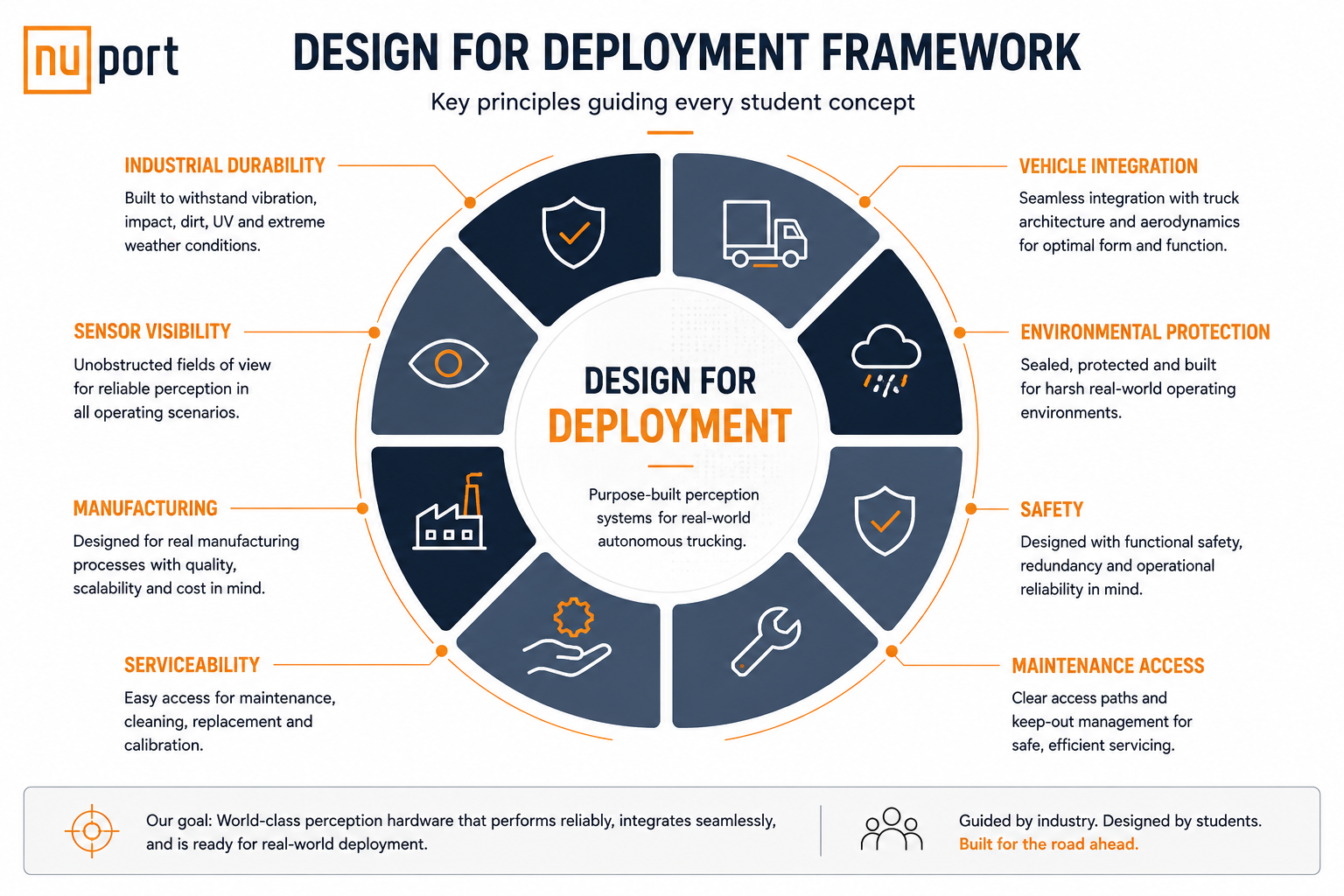
Design for Deployment Framework Diagram.
Why NuPort Did This
This initiative reflects NuPort’s broader commitment to supporting the innovation ecosystem, including academic institutions and emerging talent.
But it was also highly practical.
The collaboration allowed NuPort to implement the 4 E’s:
Explore new design directions
Engage future transportation designers early
Expand creative thinking beyond internal development
Expose students to real autonomy deployment challenges
All participating students, including runners-up, were financially recognized for their work, reinforcing the seriousness and professional nature of the engagement.

Colin Dhillon, Chief Business Officer, NuPort Robotics
“Autonomy is no longer a research problem, it’s a deployment problem. That includes how these systems are physically designed and integrated onto vehicles operating in real environments. This collaboration allowed us to bring that challenge directly to a group of highly capable students and get fresh, commercially relevant thinking back. The quality of work exceeded expectations, and in some cases, it’s directly influencing how we think about our future products.”


Judging Panel: Raghavender Sahdev, Bao Xin Chen, Kulbir Colin Singh Dhillon, Bir Bikram Dey, Katie Allison, Ken Cummings, Robert Virtu, and Sumit Bhatia.

Xander Adams, placed 1st in the design competition, receiving the winning cheque from NuPort’s co-founders, Raghavender Sahdev and Bao Xin Chen.

A successful project for both Nuport and Humber Polytechnic.
What Comes Next
NuPort is now evaluating elements from selected concepts for continued engineering development and future prototype exploration.
The collaboration also created new pathways for future recruitment and ongoing engagement with Humber Polytechnic’s transportation design program.
As autonomy continues moving from pilot projects into scaled deployment, the industry will require more than advanced AI.
It will require autonomous systems that are manufacturable, maintainable, serviceable, and designed for the realities of commercial operations.
This collaboration was one step toward building that future.
